深圳机器人外观设计,诚信专业,服务快捷
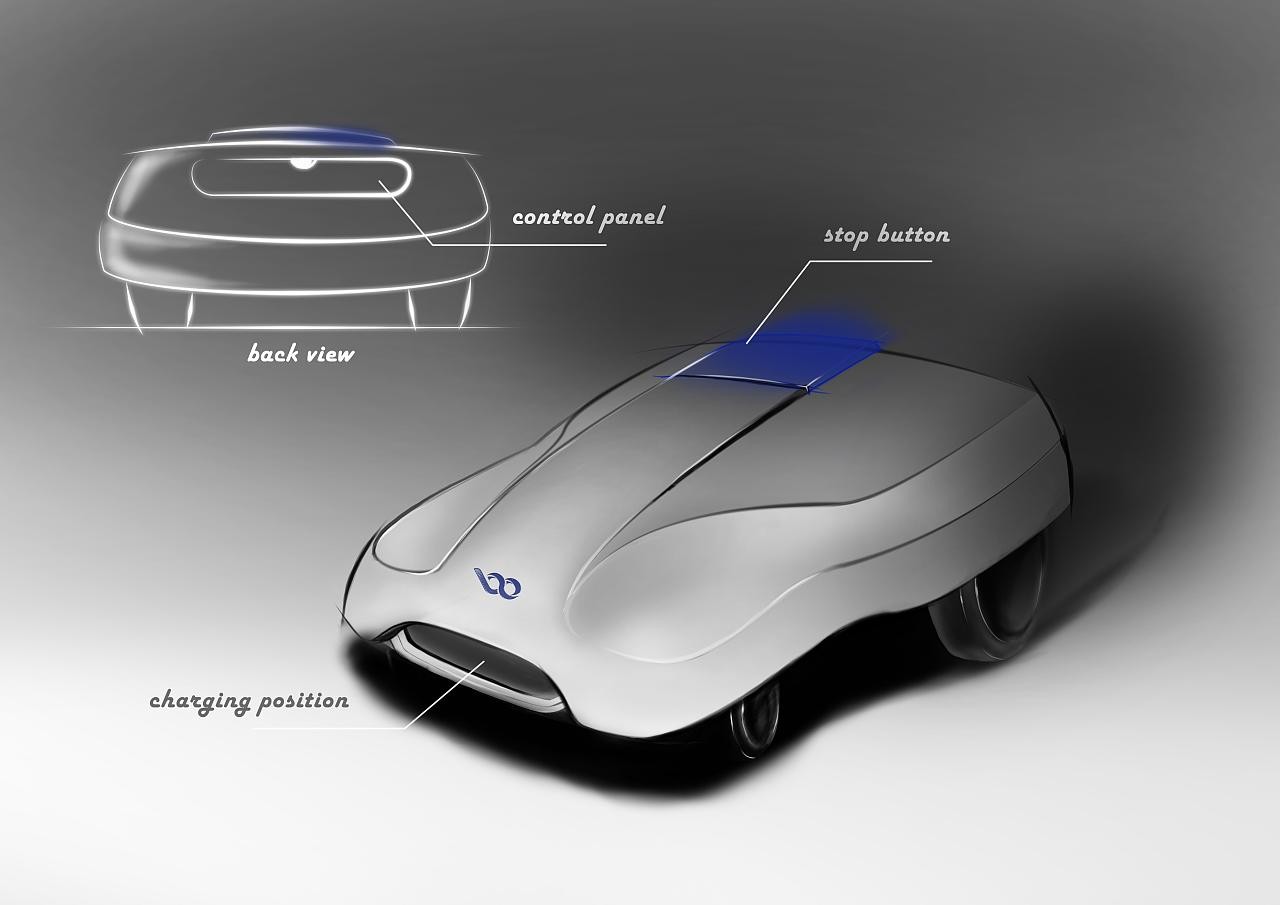
价格:面议 2025-12-03 10:55:01 1934次浏览不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场景。
当然设计出来的机器人外观,能否实现的了量产,考验设计师的设计经验,很多工业设计师能够从技术、材质、工艺等条件上,判断所设计的机器人外观是能够实现得了量产。
工业机器人按臂部的运动形式分为四种。直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。
工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。
机器人操作臂的定位精度是根据使用要求确定的,而机器人操作臂本身所能达到的定位精度,取决于定位方式、运动速度、控制方式、臂部刚度、驱动方式、缓冲方法等因素。
工艺过程的不同,对机器人操作臂重复定位精度的要求也不同。
- 公司: 深圳基准机器人设计公司
- 主营: 深圳机器人外观设计,诚信专业,服务快捷
- 地址: 深圳市南山区前海月亮湾大道2076号中国高科大厦D栋7楼
- 联系: 龚玟宾
- 手机: 13807495700 13808412765
- 电话: 0755-23761048
-
微信:

百业网店
升级网店,请联系百业网客服:胡俊芝,13430280647